|
Completed Research |
|
Robert White, Mech. Eng. |
|
WARNING: This page contains pdf files of articles that may be covered by copyright. You may browse the articles at your convenience, in the same spirit as you may read a journal or a proceedings article in a public library. Retrieving, copying, or distributing these files may violate copyright protection laws. Liquid Metal
Interconnects for Conformable Sensor Packaging Enabling Inertial Measurements
of Animals and Soft Robots Nikolas Kastor1
and Robert D. White2 1
Tufts Mechanical Engineering Graduate Student 2 Tufts Mechanical Engineering Faculty In biomechanics,
inertial measurements units (IMUs) are used to map the dynamic modes and gates
of locomotion of animals. Typically,
thin wires are soldered to the IMU and the package is bonded to the location of
interest, on the animal, using cyanoacrylate or epoxy. These types of adhesives and the solder of the interconnects are brittle and typically fail from cyclic
loading of the animal flexing its body.
The same situation can be found in soft robotics, where a compliant and
durable way of connecting electrical components within the body of the robot is
required to maintain its soft characteristics. To solve this problem, we propose a
self-contained package, which encapsulates an IMU, made from a flexible
elastomer with room temperature eutectic metal interconnect wiring. Because of the compliant nature of the
materials used, the electronics package can then be bonded to a flexible
surface with van der Waals forces. Using
eutectic metal allows for compliant interconnects that will not break or change
their resistivity under large strains. The electrical connections between the
solder pads of a 3x3x1mm IMU are bridged to the required capacitors in 100x50µm
microfluidic channels. 88µm diameter
wires that exit the package to measurement electronics are attached by
submersion of their stripped conductor in 300µm diameter wells. A positive pattern for molding the
microfluidic system was manufactured by standard SU-8 photolithography on a Si
chip where the IMU, capacitors and wires were placed on specific
features of the micro-channels and encapsulated and filled with liquid metal.
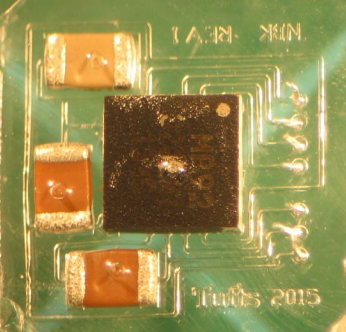
Fig: A soft PDMS encapsulated sensor
system with embedded inertial measurement system IC, discrete components, and
microfluidic channels for liquid-metal interconnects. This packaging method enables
all-soft-material packaging of sensors and electronics for soft robotic
systems, internet-of-things applications, and biometric measurements on small,
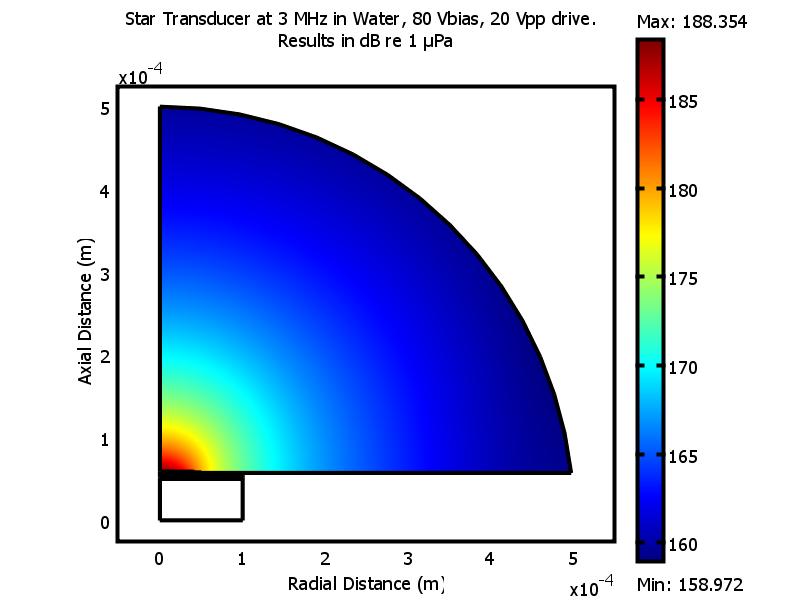
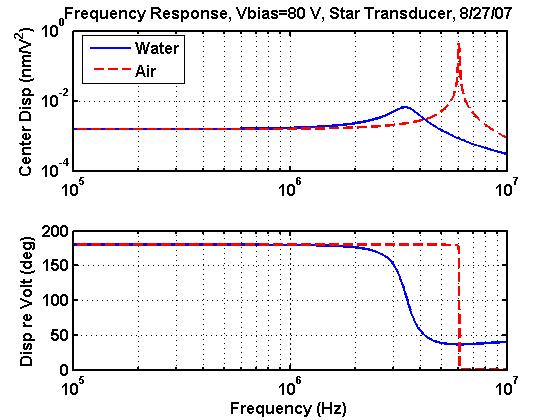
soft animals. Relevant Publications:Nikolas Kastor and Robert D. White, "Liquid Metal Interconnects for Conformable Sensor Packaging Enabling Inertial Measurements of Animals and Soft Robots" in the 43rd iMAPS New England Symposium and Expo, Boxborough, MA, May 3, 2016. Modeling and Characterization of MEMS Based Biomedical Ultrasound ElementsWe are working with collaborators to produce and validate computational models of capacitive micromachined ultrasound transducer elements (cMUTs) that are being used as part of a MEMS-based biomedical ultrasound system. This project involves both computational and experimental aspects, as well as close collaboration with industrial and academic partners. Student: Christopher Doody, ME Masters of Science student. Lemmerhirt, D. F., Cheng, X., White, R. D., Rich, C. A., Zhang, M., Fowlkes, J. B., and Kripfgans, O. D., "A 32x32 Capacitive Micromachined Ultrasonic Transducer Array Manufactured in Standard CMOS", IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control, 59 (7), pp. 1521-1536, 2012. PDF of the paper.Doody, C., Lemmerhirt, D., Cheng, X., Collin, R., White, R. D. "Modeling and Characterization of CMOS-Fabricated Capacitive Micromachined Ultrasonic Transducers", Journal of Microelectromechanical Systems, v. 20, n. 1, pp. 104-118, 2011.PDF of the paper. C.B. Doody, R. D. White, J.S. Wadhwa, and D.F. Lemmerhirt, "Characterization and Modeling of Capacitive Micromachined Ultrasound Transducers for Diagnostic Ultrasound" in Proceedings of the ASME IMECE, Boston, MA, October 31-November 6, 2008. PDF of the paper.
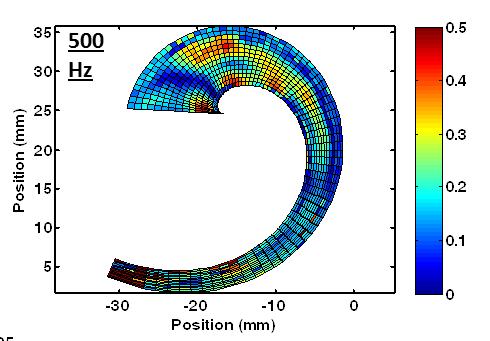
Model results showing a predicted element frequency response in air and water, and a beam pattern in water. Computational and Experimental Models of Cochlear MechanicsComputational and experimental modeling of the active and passive mechanisms present in the mammalian cochlea. This project is evolving, and may take different paths as it progresses. Currently, we are looking at computational models of basilar membrane static load tests and experimental models of cochlear coiling. We are also interested in middle ear models, and cochlear-like transducer design. Students: Shuangqin Liu, ME PhD, Douglas Gauthier, ME MS, Ethan Mandelup, ME Undergraduate, Arielle Fakhraee, ME Undergraduate, Bonita Tam, ME Undergraduate, Raymond Leung, ME Undergraduate.
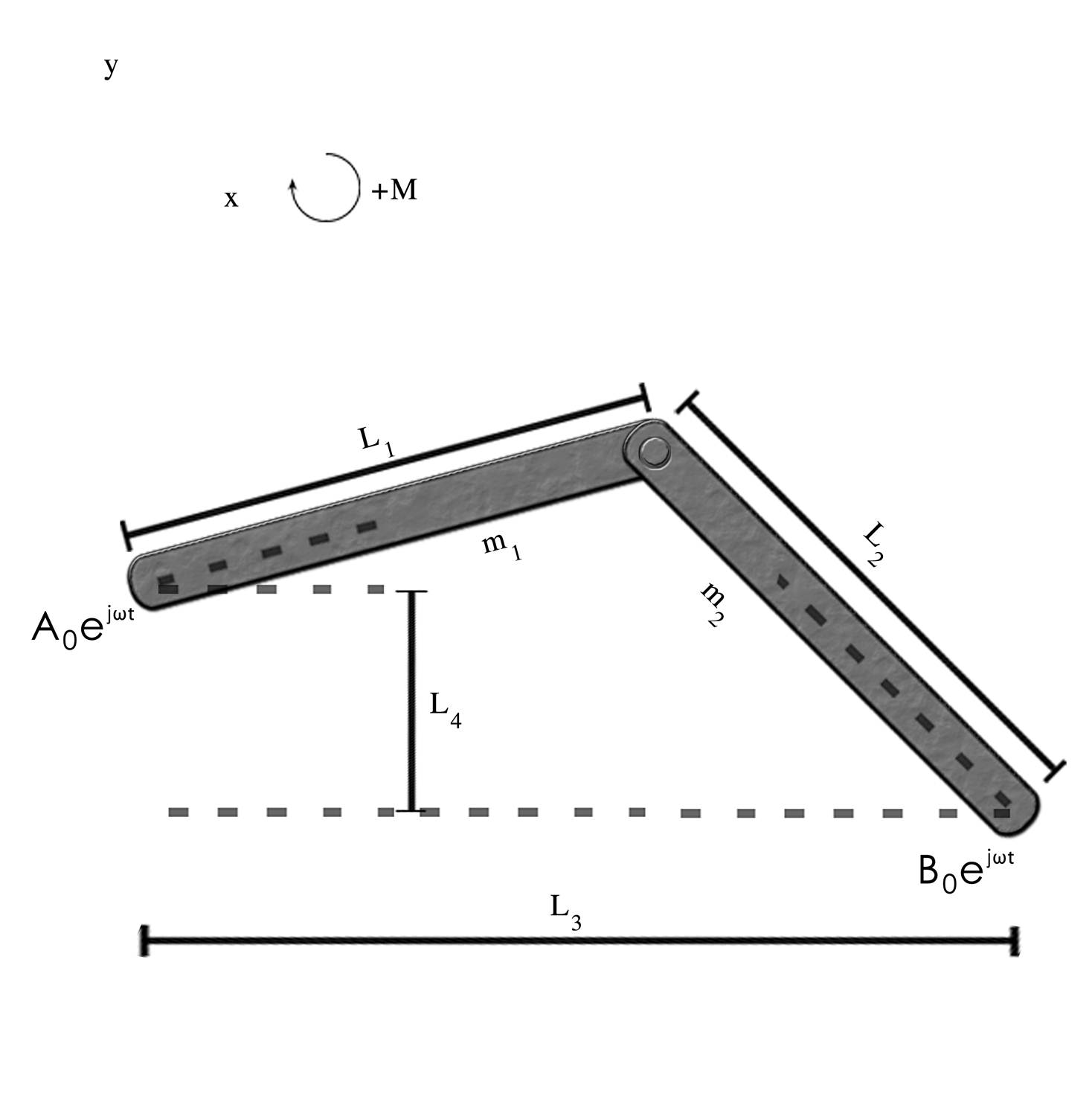
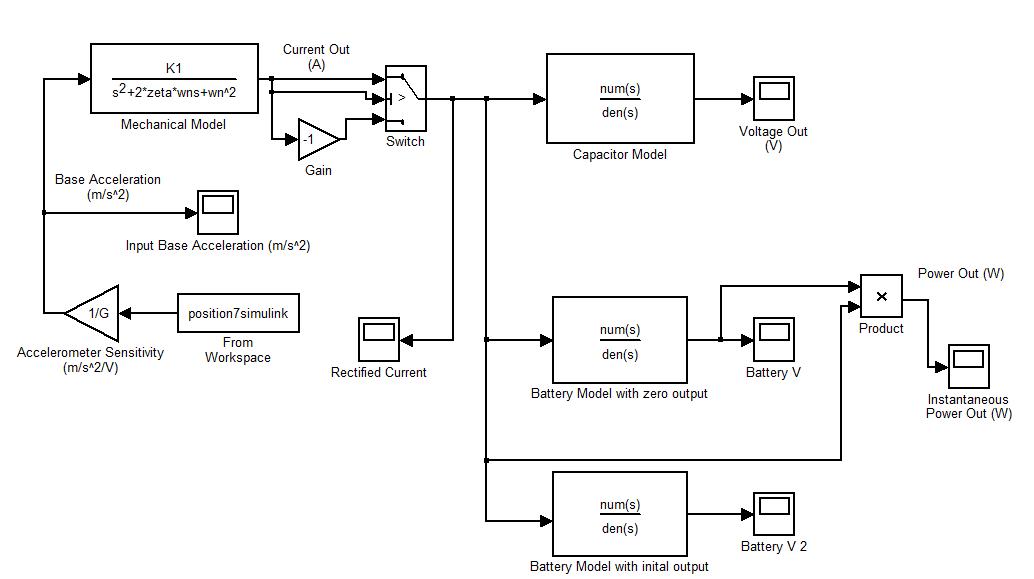
Left: Photograph of a coiled physical model with a tapered fluid filled chamber and tapered membrane. Right: Example membrane vibration measurements achieved in the mechanical experiment, measured using LDV at 500 Hz. For more details see Tam, Fakhraee and White in Mechanics of Hearing 2011. Vibration Energy HarvestingIn this project, we are exploring aspects of the mechanicsl design of vibration energy harvesting systems. Vibration energy harvesters extract energy out of environmental vibrations that may be present in structures, vehicles, or people with the aim of powering autonomous systems without the need to change batteries or recharge externally. This project particularly focuses on novel mechanical structures that may offer advnatages for higher energy output in certain kinds of environments. We are exploring both multi-link and continuously variable structures. Students: Rameen Aryanpur and Mikkel Reske-Nielsen, ME Masters students.
Images of a two-link energy harvester(left), and a block diagram of the system model. Thin Film Composite MEMS ActuatorsWe are developing MEMS actuators based around shape memory alloy (SMA) microwires or bimetallic strips in an elastomeric structure. The ultimate goal is to use these soft actuator patches for actuation of an all-soft-material robot under development with collaborators. We are working on fabrication, modeling, design, and testing of these devices. Students: Minchul Shin, ME PhD student, Alex Brindle, ME Undergrad, Aaron Gerratt, ME Undergrad, Peter Fallon, ME Undergrad, Brian Keirstead, ME Masters of Science student. 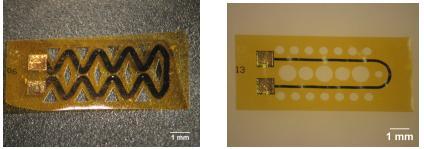
Two photographs of the thin film actuator devices. Soft Material RoboticsWe are working with a team of researchers at Tufts to construct, model, and demonstrate all-soft-material robots. The project has a biomimetic bent; we look to caterpillars for inspiration. However, we have been branching out from this starting point to a wide array of structures, actuation schemes, and control strategies. The project involves systems engineering, manufacturing, and computational modeling. Students: Alex Brindle, ME Undergraduate, Brian Kierstead, ME Masters of Science Meghan Kate, Greg Bettencourt, James Marquis, Aaron Gerratt, Peter Fallon, Brian Kierstead, Robert White and Barry Trimmer, "SoftBot : A soft-material flexible robot based on caterpillar biomechanics" in Adaptive Movement in Animals and Machines, AMAM 2008, Cleveland, OH, June 1-6, 2008. PDF of the paper.Saunders, F., Golden, E., White R. D., and Rife, J. "Experimental Verification of Soft-Robot Gaits Evolved Using a Lumped Dynamic Model", Robotica, 2011.PDF of the paper. 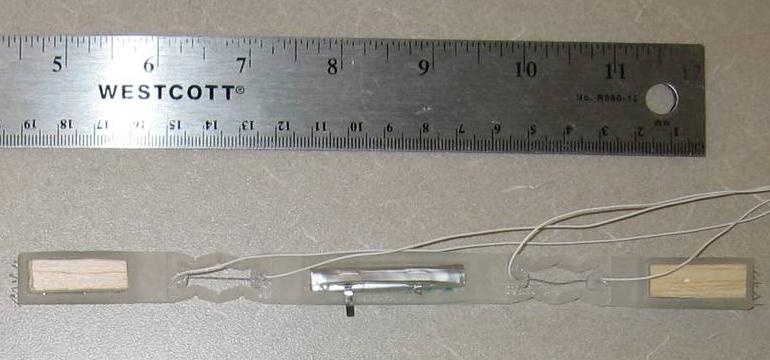
Photograph of one soft robot design, molded out of a silicone elastomer, with shape memory alloy actuators. Rapid Hot Embossing of Silk BiopolymersWith collaborators from the Biomedical Engineering department, we are working on developing tools and methodologies for rapid nanoscale hot embossing of silk fibroin biopolymer thin films. The project includes construction of custom hot embossing apparatus, process characterization, and evaluation of the optical properties of the embossed thin films. A microscale heater array is also under development for rapid, programmable thermal writing on silk thin films. Postdoctoral Researchers: James Vlahakis, PhD, Caprice Gray, PhD Students: Ethan Mandelup, ME Undergraduate Amsden, J., Domachuk,,P., Gopinath, A., White, R.D., Dal Negro, L., Kaplan, D. and Omenetto, F. "Rapid Nanoimprinting of Silk Fibroin Films for Biophotonic Applications", Advanced Materials, vol. 22, 2010. PDF of the paper.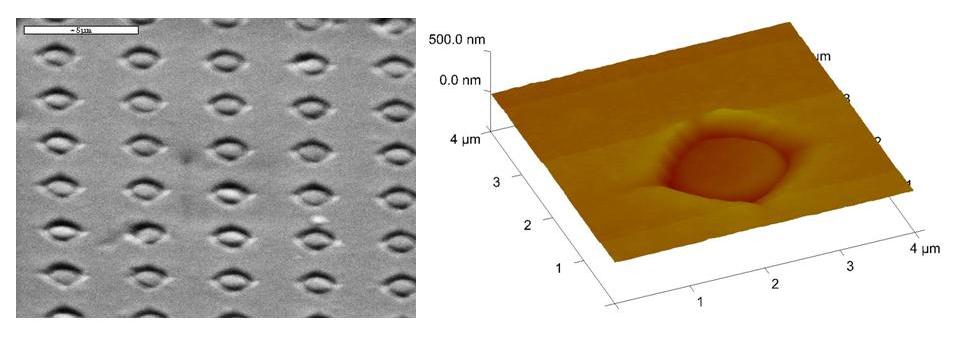
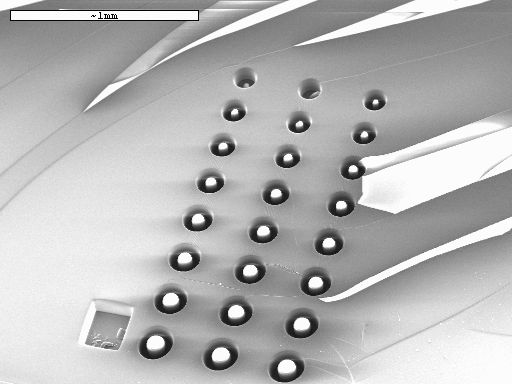
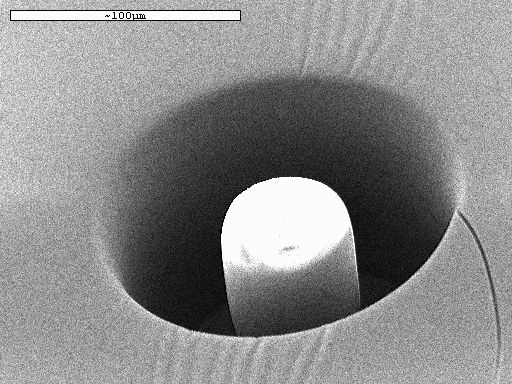
SEM and AFM images of nano-imprinted silk thin films. Stress Sensors for Chemimechanical Polishing (CMP)We are developing MEMS stress sensors to measure the interaction forces between the polishing pad and wafer during CMP processing. This will include both fluid shear stresses and direct solid-solid contact between pad asperities and the wafer surface. Floating element sensors and polymer micropost sensors are being pursued. The project is being conducted with industry and academic partners from around the country. Students: Minchul Shin, ME PhD students, Andrew Mueller, ME Masters of Science student, Douglas Gauthier, ME Masters of Science student.
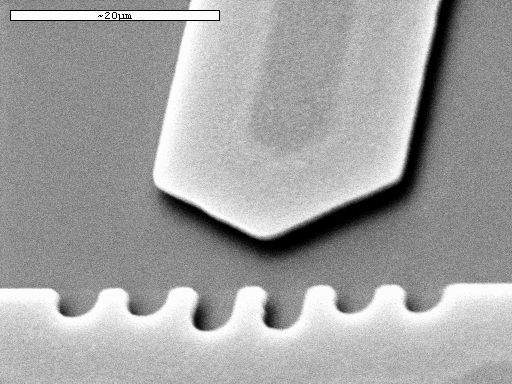
SEM images of PDMS post-in-well sensors developed at Tufts by Andrew Mueller and Robert White. Cochlear-like Biomimetic Acoustic SensorsDesign, modeling, and fabrication of MEMS sensors which mimic some of the mechanics of the mammalian cochlea as an alternative, low-power acoustic transduction and signal analysis mechanism. Project conducted with Karl Grosh at Univ. of Michigan. For more information and a list of publications, follow this link. NSF also has a page on this project with more information and a video. 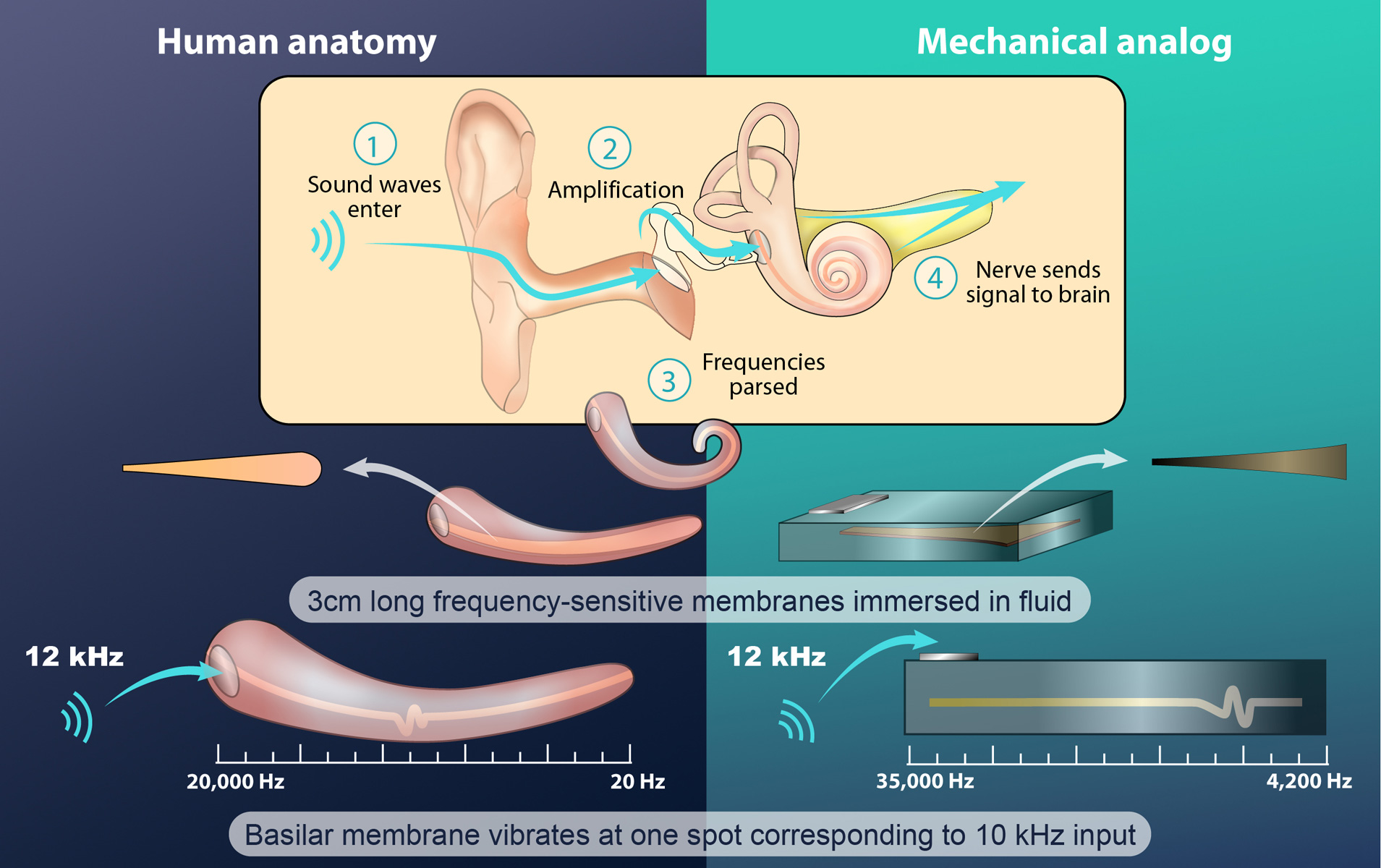 This concept drawing was made by Zina Deretsky, National Science Foundation.White, R. D., and Grosh, K. "Microengineered hydromechanical cochlear model" Proceedings of the National Academy of Sciences 102 (5), pp. 1296-1301. LINK to the paper. White, R. D., Littrell, R., and Grosh, K., "A Biomimetic Cochlear Like Sensor", pp. 1-20, in Microfluidic Technologies for Human Health, Utkan Demirci, Ali Khademhosseini, Robert Langer, and Jeff Blander, eds., World Scientific Publishing Company, 2013. ISBN 978-9814405515. LINK White, R. D. and Grosh, K. "Trapped-Fluid Traveling Wave Filters Based on the Mammalian Cochlea" in Proceedings of the uTAS 2005 Conference, Ninth International Conference on Miniaturized Systems for Chemistry and Life Science, K. F. Jensen, J. Han, D. J. Harrison, and J. Voldman, Eds., pp. 666-668. PDF of the paper. White, R. D. and Grosh, K. "Fully Micromachined Lifesize Cochlear Model" in Auditory Mechanisms: Processes and Models, A. L. Nuttall, ed., World Scientific, 2006. PDF of the paper. Comparison of Techniques for Polysilicon Residual Stress MeasurementsExperimental work comparing wafer curvature measurements, micro-rotating structures, buckling microstructures, and vibrating microstructures for the measurement of residual stresses in thin polysilicon films. Student: Andrew Mueller, ME Masters of Science student.
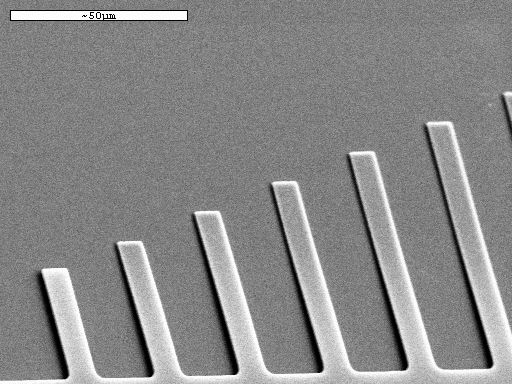
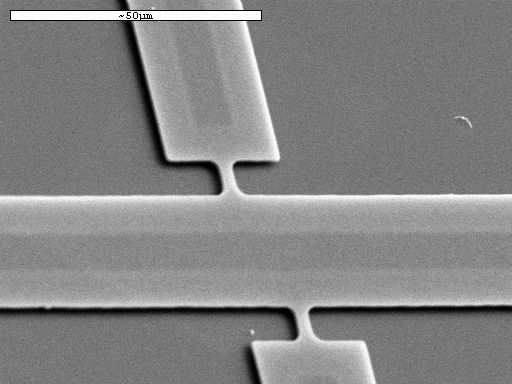
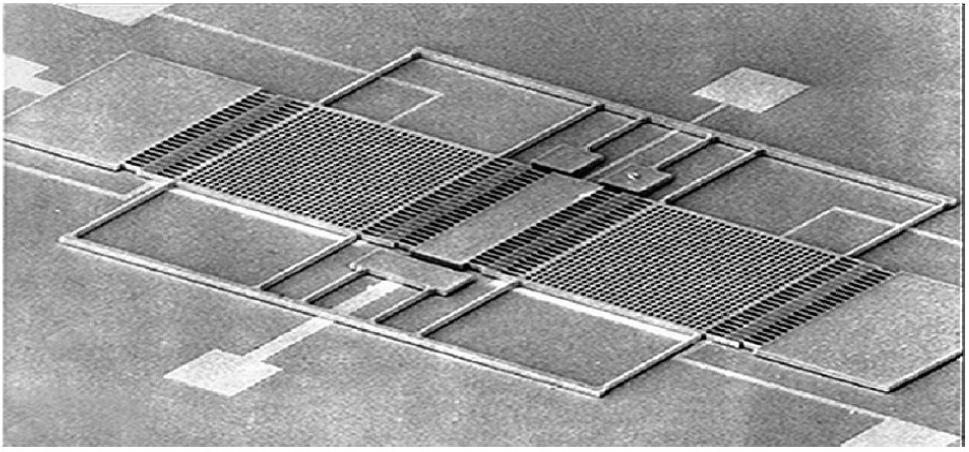
SEM images of surface-micromachined polysilicon structures developed at Tufts by Andrew Mueller and Robert White. Fabrication was conducted partly at the MIT Microsystems Technology Laboratory and the University of Michigan Nanofabrication Facility.
Active Vibration Cancellation for Essential TremorEssential tremor is a motion disorder which can make it difficult for some people to perform manual operations such as writing, eating, or applying makeup. The goal of this project is to design a feedback control system with an electromagnetic inertial actuator to actively cancel essential tremor. The control system must autotune to deal with variation of the plant properties over time. Both computational and experimental systems are being examined. Collaborator: Ken Kaiser, Draper Labs . Student: Nicholas Stone, ME Masters of Science. 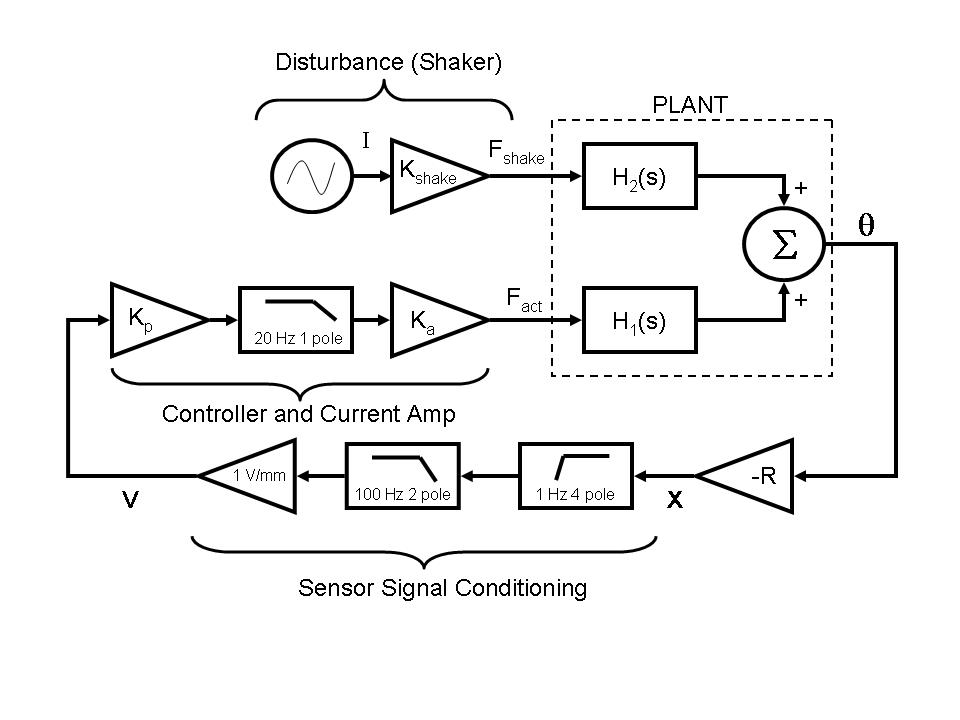
Block diagram of the system model and controller.
Design of a Permanent Magnet MEMS MicrophoneDevelopment of a novel design for a MEMS microphone based on magnetic sensing. Fabrication should be relatively simple with fewer steps and easier material systems that piezoelectric sensing or capacitive sensing, but sensitivities appear to be comparable. Student: Liam Kelly, ME Masters of Engineering (graduated). 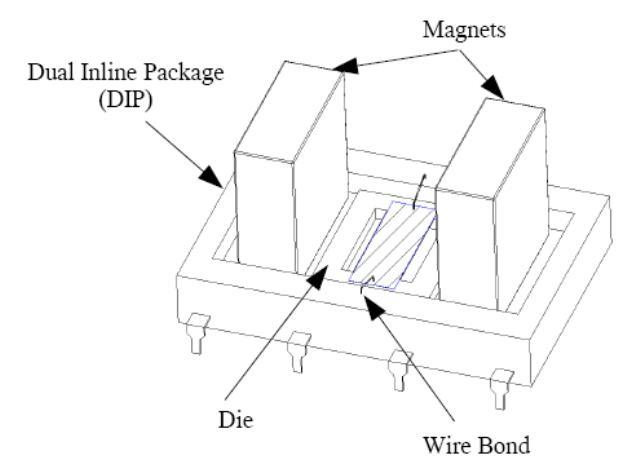
CAD rendering of the magnetic microphone design. Shock and Vibration Effects on MEMS GyroscopesProf. White's Master's thesis was conducted at Draper Laboratories and MIT in Cambridge, Massachusetts. I worked in the MEMS test lab, where we dealt mainly with micromechanical inertial sensors. My thesis was concerned with vibration and impact testing of Draper's MEMS Tuning-Fork Gyroscope. Return to the top level page. |